Exploration of the fundamental questions on the perception by people of the interconnections between robots or virtual characters’ appearances and behaviours.
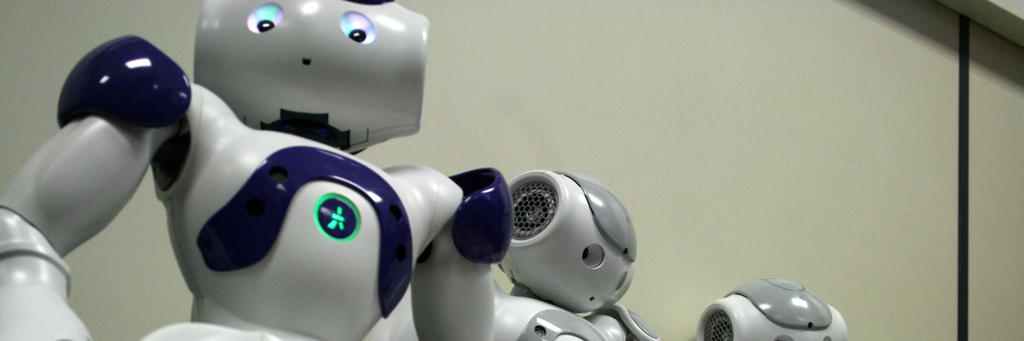
ANIMATAS is a MSCA – Marie Skłodowska-Curie Actions project that aims to give researchers the necessary skills and international experience for a successful career either in the public or the private sector. The project is an Innovative Training Network (MSCA ITN) implemented by a partnership high profile universities, research institutions and industrial research partners that are located in 8 different countries.


This project’s fundamental goal is to offer an educative train to a new generation of early-stage researchers (ESRs) in the emerging area of human-machine interaction for education. The program is structured around 15 Individual Research Projects and will last 4 years during which 15 selected ESR’s will base their work on 3 main research topics:
Exploration of the fundamental questions on the perception by people of the interconnections between robots or virtual characters’ appearances and behaviours.
Development of new social learning mechanisms dealing with different types of human intervention and allowing robots as well as virtual characters to learn in an unconstrained manner.
Development of new approaches for robots and virtual characters’ personalised adaptation to human users in unstructured and dynamically evolving social interactions.
ANIMATAS is hiring 15 PhD students to work on various exciting research topics in the scope of human-machine interaction for education in schools. PhD candidates will benefit from a unique doctoral training programme covering scientific, technical and business aspects, they will also have the opportunity to spend time experimenting their research outcomes in the actual world with real users.